On a pas mal relayé l’idée qu’il fallait de la distanciation sociale, et plus particulièrement de la distanciation physique, sauf là où cela génère du pognon bien évidemment. Mais il n’y a pas que des directives hasardeuses du gouvernement qui ont conduit à une distanciation de plus en plus énorme. Avec l’âge, les difficultés à affronter pour revoir ses potes et ses proches sont croissantes. Petit récap sur ces dix quinze dernières années.
photo entête: « DSC00031/French Polynésia/Mooréa Island/ » by dany13 is licensed under CC BY 2.0
Les cercles qui ne se mélangent pas

« Isolation » by dingatx is licensed under CC BY-NC 2.0
Le couloir relationnel des écoles
L’école est la source principale des liens entre personnes. à partir de là on fait connaissance avec des potes de potes, et ça a toujours été ainsi jusqu’à l’arrivée de web dans les chaumières. Sortir des cercles de gens connus et pouvoir explorer un peu plus loin que les couloirs des études demandait des efforts bien plus importants à l’époque sombre précédant l’arrivée du web dans les maisons. Comme pour énormément de gens, les personnes avec qui j’entretiens des relations depuis longtemps ont été rencontrées dans les cours de récrés scolaires. L’organisation de soirées à permis à tout un chacun d’apporter de la variété dans ses contacts et de rencontrer de nouvelles personnes. Pendant un temps on maximise les espaces où on peut faire du mixage de gens variés, puis lorsque l’on rentre dans la vie active on est vite fatigué, on trouve nos préférences, on préfère fréquenter moins de personnes à la fois pour mieux connaître les autres, on évite certains contextes où ça ne nous amuse plus de voir des gens repousser les limites d’eux même n’importe comment. Les festivals autour de centres d’intérêt variés ont permis d’élargir mes cercles de relation, les forums en ligne, les associations, les contributions aux logiciels libres, les clubs de sport… Je n’ai jamais tellement tenté les sites de rencontre quand j’étais célibataire, donc je ne saurai pas vous dire si ça permet vraiment de rencontrer des gens intéressants. Enfin, Il existe des tas de moyens de rencontrer d’autres personnes, ça demande de faire l’effort de se déplacer parfois loin, ou de changer légèrement ses habitudes, mais ça vaut souvent le coup.
Le mur de la clope
Un des premiers remparts à la sociabilisation a été l’omniprésence des clopeurs dans mon entourage. On veut juste être bien avec ses potes, et on doit respirer de la merde qui nous raccourcit l’espérance de vie quasi en continu. Et encore, j’ai commencé à voir des potes à une époque où cloper dans les restos était devenu interdit. C’était déjà bien dégueulasse dans les wagons de train, mais dans les restos au secours quoi.
De fait, j’ai cherché à diversifier mes cercles de gens uniquement pour ne pas souffrir tout du long. Fort heureusement je fréquentais des gens qui globalement clopaient en extérieur et avaient un tant soit peu de respect pour les non fumeurs. Il faut dire que globalement, parmi les personnes qui dessinaient j’étais très surpris de voir que c’est un milieu où les gens sont globalement de la culture straight edge sur ce point. Bonne nouvelle par la suite, c’est grandement passé de mode parmi mes vieux amis, se voir était donc beaucoup plus agréable par la suite. Point bonus, on a tous rallongé notre espérance de vie.
La limite du pognon
Il y a peu de chances que vous fassiez les mêmes activités que des personnes incroyablement plus fortunées que vous pour la simple et bonne raisons que des barrières autour de l’argent existent partout. Je n’ai jamais trop vécu cette limite de ressources, sauf quand il s’agissait de dépenser un pognon que je n’ai pas pour contribuer à des rencontres-beuveries du temps où j’étais élève de collège/lycée. Là où se faire un kebab, un fast-food, une partie de laser quest, se payer des cartes magic ou des mangas coûte assez peu cher à la fois, les soirées beuveries demandent des dépenses plus importantes et c’est là qu’apparaissent les budgets de chacun. C’est souvent pour ce genre de choses, des fringues, et pour des clopes, que les élèves commencent à faire des petits jobs qui paient mal, dans des conditions qui attaquent durablement la santé. Ce que j’ai fait le moins possible. Ce n’est qu’après mes études supérieures, payées par mes parents, que j’ai enfin pu être beaucoup plus zen avec mes activités, n’ayant plus à monitorer très précisément mes dépenses, je n’avais plus à vérifier scrupuleusement le prix des choses et chercher les produits bas de gamme à tous les coups.
Il faut reconnaître que les budgets que l’on alloue aux loisirs sont directement liés aux activités sociales que l’on peut se permettre. manger un kébab entre copains: pas cher. Faire un tour en avion zéro G entre copains: un peu plus cher. Sortir en discothèque: super cher.
La barrière de la langue
Ne pas parler la même langue constitue une barrière très importante pour fréquenter des gens, et à plusieurs niveaux. Quand bien même on se comprend, il peut exister des écarts culturels très inattendus. Heureusement ces écarts suscitent bien plus souvent de l’amusement et de la curiosité que de l’hostilité. J’ai rencontré des chocs culturels bien plus importants avec des personnes parlant exactement la même langue que moi et ayant le même âge qu’avec les étudiants Erasmus venant de pays à des milliers de kilomètres. Comme j’avais de l’intérêt pour la langue anglaise depuis un bout de temps, la barrière de la langue a été assez faible en ce qui concerne les gens avec qui j’ai pu sociabiliser. On peut se faire comprendre par énormément plus de gens sur terre si on parle Englishe que si on parle Mandarin. La Langue aurait pu être une barrière forte mais je n’ai pas l’impression que ça l’a été. Il aura fallu tout de même attendre les environs de mes 22 ans pour que je puisse commencer à comprendre une vidéo parlée en Anglais sans sous titre. Un truc qui sert beaucoup dans la vie mine de rien.
De simples divergences de parcours
Les amitiés se font et se défont régulièrement et c’est bien normal.
Voir du monde quand on a dépassé la trentaine, que l’on a un boulot chronophage (ou une vie associative avec des gérants humainement toxiques qui n’hésitent pas une seconde à épuiser leurs membres, pour ne pas citer une certaine association écolo) et qu’on a fondé une famille dont les enfants ne seront pas autonome avant une vingtaine d’années demande d’aller à l’encontre d’énormément de contraintes pour avoir une vie sociale un minimum satisfaisante, voire une vie personnelle, non dédiée à l’entretien de quelqu’un d’autre, un minimum existante. Il faut savoir rejeter et parfois affronter certains de ses proches et moins proches pour garder des liens que l’on estime précieux avec des personnes qui ne sont pas accessibles en deux minutes à pied.
Certains liens ne valent pas le coup, d’autres oui, mais pour le déterminer il ne faut pas attendre que ce soit toujours aux autres de nous contacter. Couper concrètement des liens avec de vagues connaissances est une chose plus difficile émotionnellement que de mettre un râteau à quelqu’un. C’est parfois nécessaire, car notre temps n’est pas infini et il vaudrait mieux le consacrer à des personnes importantes. Mais ce n’est pas évident de trancher aussi, car un manque de relance ne signifie pas forcément un désintérêt de la relation.
Un manque total de retour suite à des relances, ou si l’autre annule systématiquement les RDV et ne propose aucune suite est cependant un bon signe que l’autre personne ne souhaite pas poursuivre. Dans ce cas il vaut mieux aller se faire foutre un œuf et tout le monde ne s’en portera que mieux.
Jamais par écrit
Certains gens qui foutent des vents par écrit et ne savent pas répondre autrement que par téléphone histoire de bien faire perdre son temps et le monopoliser par l’interruption des activités de l’autre, alors que l’on peut distiller dans le temps des échanges par écrit sans monopoliser totalement le temps des autres. L’écrit a de nombreux avantages pratiques. Mais pour un nombre incroyable de gens, seul l’échange oral est un véritable échange, contrairement à ce que la justice considère comme opposable. Certaines personnes n’envisagent pas que l’on puisse garder un lien social autrement qu’à l’oral. Illettrisme ou juste habitude culturelle, allez savoir.
C’est particulièrement pénible dans des relations ou aucun affect n’est en jeu, typiquement quand on paie quelqu’un pour un service par exemple et que l’entreprise en face n’est pas foutue de faire son boulot autrement que si on lui parle au téléphone, qu’on lui rappelle régulièrement que ça va chier pour eux si ils ne font pas ce qui est convenu, ou qu’on les menace carrément de procès. Parfois, il vaut mieux s’équiper d’un avocat qui saura faire les bonnes lettres recommandées, on a tout simplement pas d’autre option pour faire aboutir des choses pourtant simples. Notamment lorsque l’on paie des travaux dans le domaine du bâtiment.
L’énergie à investir pour une discussion synchrone est affreusement plus grande que pour une discussion asynchrone où on peut en plus énoncer clairement nos attentes. Cependant, les échanges par e-mail c’est inadapté à beaucoup de cas d’usage. L’e-mail ça reste une idée vraiment merdique pour gérer des listes de choses à réfléchir à plusieurs ou pour réunir des documents. Il vaut mieux une discussion sur un canal, un forum, un wiki, un dossier partagé, ou des gestionnaires de tickets.
L’essor des messageries et des réseaux sociaux a changé de beaucoup la façon d’entretenir ou ne pas entretenir des liens. Il suffit de rechercher à un seul endroit du nom d’une personne pour pouvoir la joindre ultérieurement et avoir une idée assez précise de ce que cette personne souhaite mettre en avant de sa vie. Ou du moins, de ce que le GAFAM que l’on consulte veut bien encourager à mettre en avant. Demander le numéro de téléphone d’une personne est autrement plus intrusif que demander son nom, ce qui est un énorme revirement de perception de ce qui constitue une information qu’on ne donnerait pas à n’importe qui. Quand bien même on installe volontiers des tas de mouchards sur un objet qui fait de la collecte dans nos poches, en continu, sans que l’on ait à écrire quoi que ce soit.
Le nombre de Dunbar donne une idée du nombre de gens avec qui l’on peut réellement entretenir des relations, et ce nombre est bien plus petit que le nombre de gens dans votre carnet d’adresses ou vos “amis” facebook. C’est le même nombre que le nombre de pokémons: 150, soit le nombre de convives dans un mariage assez gros. ça ne veut pas dire que ces 150 personnes sont tous vos BestFirendForevar, ou que vous ne pouvez plus avoir de relations au bout de 151 personnes. ça veut juste dire que vouloir entretenir des relations stables avec un plus grand nombre de personnes est difficle, et encore, la fiabilité des études qui a amené à cette conclusion est largement remise en question et semble peu applicable à la vie sociale de 2021.
La disparition de lien se pratique aussi par absence de sollicitation et l’absence de réponse à une sollicitation pour d’autres raisons que la culture ou l’habitude: quand on souhaite ne pas entretenir une relation mais sans forcément se lancer dans des hostilités ouvertes. Car bien évidemment, on fait le tri dans ses contacts de façon plus ou moins consciente, et on ne souhaite pas garder de lien avec tout le monde sans avoir à aller enterrer des corps. Ce ne serait vraiment pas très sympa, comme dirait un ami philosophe.
L’exode urbain
J’ai une bonne partie de mes contacts qui datent des études primaires, et bien qu’on ait tous des parcours d’études et des jobs assez différents, on restait en contact car nos parents habitaient toujours la même ville. Il était donc facile de se croiser à l’occasion où nous allions voir nos parents respectifs. Certains ont posé leur logement pas très loin de là, quasiment dans la même ville, d’autres à des milliers de kilomètres.
Chacun fait sa vie et adopte de nouveaux horizons comme il peut, certains parents font leur vie ailleurs, d’autres souhaitent reprendre contact sans succès, certains conflits éloignent des parties de cercles, des ruptures amoureuses font disparaître des groupes qui étaient reliés ensemble d’un seul coup de part et d’autre, d’autres ne songent pas à prendre de nouvelles plus par oubli que par désintérêt, et certains ne sont tout simplement plus en vie, emportés par des accidents de sport ou de voiture, un cancer foudroyant, ou une attaque cardiaque qui ne prévient pas comme ça a été le cas cette année. Il n’y a pas que le COVID qui tue, mais à cause de la saturation des urgences à cause de la politique mortifère du service public que l’on subit depuis des années, il n’y a plus de place pour les soins des autres maladies. Et malgré la crise, des lits de réanimation (ce qui inclut le personnel compétent nécessité par chaque lit) n’ont cessé de diminuer.
L’Isolement parental
Une bonne partie des gens que je fréquentais depuis toujours se trouvaient être des contacts de festival de fanzineux. Ainsi, bien avant que ne survienne la pandémie de Covid 19, une bonne partie des gens que j’avais l’habitude de fréquenter régulièrement dans des couloirs et jardins de festivals avait disparu plus ou moins de ma vie. Être parent nous fait basculer dans un univers parallèle où subvenir au besoin vital de sommeil est un combat, jour et nuit, et un marathon qui vient s’ajouter aux difficultés habituelles que l’on doit tous affronter. Sauf si on a eu assez de chance à la naissance pour être propriétaire de son temps et ne pas avoir besoin de travailler au maximum pour survivre, et enrichir le capital de quelqu’un qui a eu d’avantage de privilèges à sa naissance.
Devenir parent c’est aussi prendre 4 fois plus de temps pour faire de nombreuses choses, créer de nouveaux rituels, devoir aller énormément plus souvent chez le médecin, perdre un temps fou à faire des préparatifs dans tous les sens avant de faire quoi que ce soit, s’alourdir d’un équipement énorme à la moindre sortie, et ce pendant quelques années. Le plus encombrant étant bien sûr la période des premiers mois. Montages de couches et produits de nettoyage en tous genre, conteneurs adaptés aux nourrissons pour dormir, manger, se déplacer (poussette), outils de sécurisation des espaces, siège auto qui doit changer de taille, bavoirs, multi couches de mini vêtements dont le prix est inversement proportionnel à la surface de tissu (un peu comme les strings :D). Pour beaucoup, cela signifie aussi changer de voiture, beaucoup de moyens de transports en commun étant totalement inadaptés à l’utilisation d’une poussette.
C’est aussi être plus ou moins contraint de ne fréquenter des gens qui répondent aux mêmes contraintes de disponibilité, sans quoi on doit faire peser sur son partenaire ou un prestataire de garde tout le poids de la gestion d’un nourrisson avec sa cohorte de besoins personnalisés. La communication interne au couple est aussi brouillée par des bruits incessants et des dérangements en tous genre. Obtenir des moments au calme, rien que pour réfléchir un peu, ou discuter entre parents, ou vraiment dormir est un combat qui devient rapidement insupportable.
Notre santé est exposée et nos défenses immunitaires mises à l’épreuve de tout ce qui traîne dans les écoles et les crèches sans échappatoire, peu importe le nombre de fois que vous vous lavez les mains, mettez du gel hydro-bourré, ou portez un masque. Alors que faire du télétravail et se faire livrer des courses nous préserve en bonne partie de la pandémie, il n’est juste pas gérable de travailler et de garder notre enfant en bas âge en même temps. Toute personne qui vous dira le contraire est un branleur de politicien qui a des domestiques pour gérer ses enfants. On a beau avoir eu la joie de vivre enfin dans une maison et ne plus subir les emmerdements nocturnes de nos voisins fêtards deux ou trois fois la semaine, il reste des emmerdements auquel on ne peut pas échapper.
Vous avez probablement déjà eu vent de ce que signifie le confinement pour vos proches, et je suppose que mon témoignage ne vous sera pas étranger. Pour certains c’était de l’ennui interminable, du vide, de la non sollicitation, quelques trucs marrants, mais globalement du vide plutôt pesant. Quand on le vit en fréquentant des adultes capables de discuter de leur ressenti et de respecter nos distances ça se passe globalement bien, mais quand on vit avec un ou des enfants en bas âge c’est juste l’enfer. Subir la présence de personnes que l’on apprécie d’habitude, sans aucun espace de détachement, sans moyen de souffler, même si on les apprécie en temps normal, est une horreur pure et simple.
Nous n’avons pas tous les moyens d’avoir des domiciles secondaires avec 52 chambres et leurs commodités séparées comme chez le Duc de Hastings. Tourner en rond sur son balcon ou marcher à proximité de chez soi seul ou avec son chien sont un palliatif léger à cet enfermement, mais le plus difficile est de ne pas pouvoir échanger ou se confier à des proches en toute intimité.
L’isolement se fait aussi à même le corps, le confinement ayant arrondi à peu près tout le monde. Oh bien sûr on peut aller courir dehors tout seul, ou faire de la ballade à vélo, mais l’état mental ne s’y prête pas. Du moins en ce qui me concerne. Remonter la pente est toujours plus difficile quand on a rompu nos habitudes de déplacements. Faire du sport demandant bien plus de motivation seul que lorsqu’on le fait en équipe. C’est aussi pour ça que j’ai dépoussiéré mon vélo et que je me suis lancé dans le mapping openstreetmap, aidé par la sociabilité de quelques cannaux de communication du projet.
La motivation descend pour beaucoup de choses, prendre contact avec des proches tout en sachant qu’on ne peut pas profiter de contacts légers en direct est également un poids. Je n’ai aucun problème à être une pipelette avec des personnes que je vois en live, mais le téléphone reste un truc qui me gave dans l’ensemble. C’est très TRES rare que j’apprécie ce médium. Si bien que je comprends complètement la motivation de Xav qui a préféré garder l’ordiphone et se débarrasser de sa carte SIM dans son quotidien. C’est un moyen très efficace pour enfin être propriétaire de son temps.
À l’opposé de ça, c’est un soulagement que de ne plus avoir à subir des heures de transport en commun (ou pas en commun) pour gagner ma vie à faire la même chose que ce que je pourrai faire à la maison, les emmerdements d’un espace de conflit comme un open space en fournissent à foison en moins, et en ayant d’avantage de contrôle sur les moments lorsque je choisis d’être joignable.
Choisir son temps de travail et de calme, et ne plus suivre l’horloge de quelqu’un d’autre est un gain énorme de qualité de vie. Mais ça demande encore d’avoir un espace de travail possible.
L’exode des GAFAM
Au début, j’ai testé plusieurs hypothèses afin de valider des alternatives pour être sûr que sortir des GAFAM n’allait pas me couper totalement des gens que je fréquente. Utiliser principalement le téléphone et des messageries m’a permis de garder contact et de voir vraiment des gens, ni plus ni moins qu’avant. La tranquillité de pouvoir discuter sans encarts publicitaires et des popups désagréables à tous les coins de mes conversations, ainsi que la transmission de toute activité à plusieurs centaines d’acteurs aux activités criminelles, ayant un effet de facilitateur de dépression avéré, et de totalitarisme, aidant à faire assassiner des militants en tout genre, enregistrant tout ce qu’on se raconte en continu pour le revendre au plus offrant, sur des lieux bien plus vastes que sur juste un seul site web.
Sortir des GAFAM m’a permis d’avoir des relations plus posées, de ne plus remplir mon temps d’un spectacle mensonger de la vie de vagues connaissances, de m’offrir du temps réellement dédié à la concentration, à l’essai de choses qui m’intéressent sans l’unique perspective de me demander si je pourrai faire grimper un compteur de likes avec cette activité, et peut être même de plus souvent voir des gens qui avaient plus ou moins disparu de mes habitudes de sorties. J’ai exporté mes données afin d’archive, puis noté les anniversaires des contacts avec qui j’avais régulièrement des liens pour que ça signifie quelque chose.
Donner du sens à son temps, ne plus chercher à le tuer, s’accorder autre chose qu’une parfaite optimisation utilitariste pour combler le vide, et maximiser l’asservissement aux dominants.
Le poids des dominations
Changer ses habitudes de communication, ou plus simplement ses habitudes tout court va à l’encontre du fonctionnement de base de notre biologie, c’est une des raisons qui fait qu’il est si difficile de se défaire de ses addictions, et plus généralement de ses habitudes, surtout quand on est tout seul à vouloir les changer dans un groupe.
On veut rentabiliser nos efforts, mais il est des cas où cette logique ne fait aucun poids: la domination.
Si quelqu’un a suffisamment d’influence sur vous, vous allez avoir tendance à dire amen à tout ce qu’il vous impose, c’est très vrai dans le monde du travail, ou encore dans le domaine de la vie en ligne où l’effet de réseau est le plus évident. Si tout le monde à l’air d’être quelque part et fait suffisamment de prosélytisme, ou vous vend les sirènes du succès, de la gloire et de la fortune, surtout si il vous dit que tout le monde peut y arriver facilement en ignorant totalement les embûches dûes au système et à la dissymétrie des pouvoirs, il suffit d’un bon budget com’ et de négation de la science, avec pourquoi pas une bonne dose de pensée magique (décortiquée ici dans l’émission Méta de Choc) pour que vous vous sentiez obligé d’aller faire partie des gens présents, ou que vous rejoigniez une secte, une arnaque en tout genre, ou un site web.
Le plafond est très plaisant mais que faire?
Ce texte à été écrit en Mars 2021, juste après le décès de Pansai, un vieil ami mort prématurément d’un problème cardiaque alors qu’il avait à peine 35 ans. Triste nouvelle qui a secoué bon nombre de gens dont je raconte les aventures sur ce blog depuis 2003. Durant l’année 2020, beaucoup de personnes ont disparu prématurément, de COVID ou d’autres raisons. La fragilité de la vie et le poids des décisions politiques de parfaits connards historiquement hostiles à tout progrès social et à toute justice fiscale (entre autres) m’a amené à me demander ce qui fait que des gens disparaissent, quel rôle on a dedans, et comment faire en sorte que les gens que l’on apprécie ne disparaissent pas de nos vie trop vite. Il n’y a pas de solution miracle, beaucoup de bonnes et de moins bonnes raisons font que l’on s’éloigne de gens que l’on estime durant une bonne partie de notre vie.
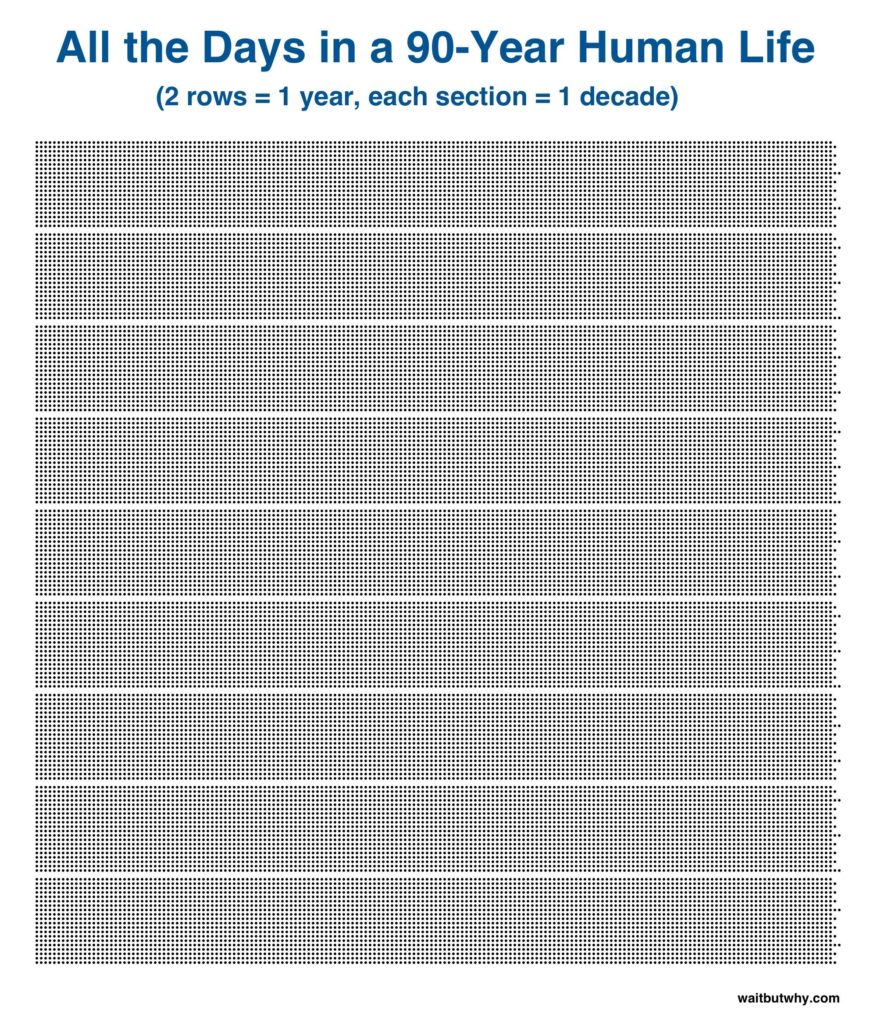
Aussi, comme Tim Urban, je vous invite à tout d’abord prendre conscience de la limite du temps qu’il vous reste, à voir graphiquement que nous nous trouvons dans la traînée finale de beaucoup de choses que l’on imagine éternelles, puis à réserver régulièrement votre temps afin de réfléchir à la trajectoire que vous souhaitez adopter, quelques contraintes faire disparaître, qui fréquenter.
- Vivre au même endroit que les personnes que vous aimez est important.
- Les priorités sont importantes.
- Le temps de qualité est important.
Encore faut il savoir ce que l’on met derrière ces notions.
La prise de conscience de nos propres limites physiques est douloureuse mais nécessaire à une vie que l’on aimerait remplie de choses qui valent le coup. Notez toutes les choses que vous aimeriez faire, ce que vous aimeriez examiner régulièrement, quelles habitudes vous souhaitez adopter, ou cesser, mais notez ces choses dans un simple fichier texte et essayer de grouper tout cela par catégories. Cela peut sembler artificiel, ou une masse importantes de choses une fois écrit, mais c’est un excellent moyen de trier ses envies et ses idées. J’ai depuis peu adopté une méthodologie proche de celle de Getting Things Done dans un fichier texte (dont je peux masquer des parties et trier les choses par tags) que j’alimente depuis mon tel ou mon ordi, et je suis vraiment satisfait de voir à quel point je peux avoir une vue globale du tout, ne rien oublier sans avoir le poids de la charge mentale qui va avec, et découper les choses en éléments simples, sur beaucoup de sujets différents.
Orgmode dans emacs est vraiment top pour gérer tout ça. Mais c’est un truc de barbu, emacs, et c’est super compliqué à maîtriser, surtout si y’a pas quelqu’un à côté pour répondre à vos questions. En tous cas vous pouvez tout à fait commencer par un simple fichier texte dans votre éditeur de texte pour simple mortel.
Faire le tri me permet de clarifier ce qui m’intéresse. Supprimer les distractions: couper toute notification, fermer les messageries, mettre le téléphone en mode avion, avoir son propre espace de concentration peut être en dehors de chez soi, se mettre dans des conditions confortables, toutes ces choses sont nécessaires à la réalisation de ce que l’on veut faire.
Prenez du temps hors ligne, révisez vos priorités, prenez le temps d’être vous même, d’aller explorer le monde, explorer vos propres croyances. Réservez des plages de temps pour examiner vos objectifs de vie, qui vous souhaitez inviter, voir, quoi faire et comment. Le reste viendra ensuite, mais ne restez pas passif vis à vis de vos cercles sociaux et ne laissez pas les autres décider de ce qui vaut le coup ou pas dans votre vie.